Highway Dataset
The dataset has been made for the development of autonomous vehicles (AVs). Volvo Autonomous Solutions, Volvo Group, has collected several highway scenes in the Gothenburg region. The dataset includes 29 000 annotated camera images. The dataset has been manually annotated by Annotell.
In short
Content
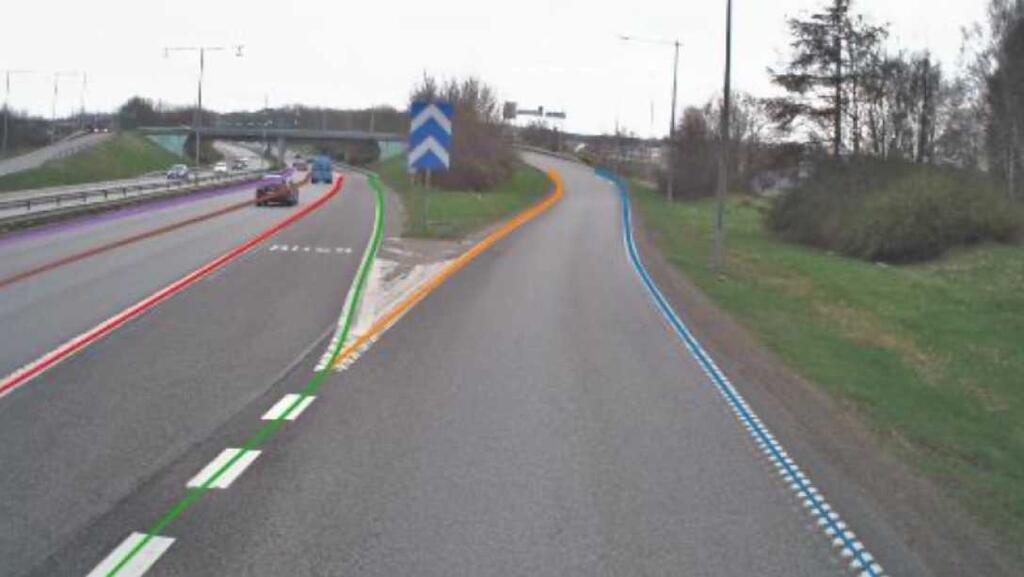
The Volvo Highway Dataset includes 28,778 images in .PNG format from different highways of Sweden, more specifically around Gothenburg. For the project, 75% of the dataset was used for training and validation, while 20% was used as a test dataset. Each image in the dataset has an accompanying annotation file in the GeoJSON format, which is a way to organize geometric information in a JSON file. The annotations are categorized into four groups: road objects, lane markers, road edges, and free space. The dataset has been acquired during different seasons which has made it possible to capture different weather conditions.
Author
The Perceptron Consortium and Volvo AB – Semcon AB – Chalmers University of Technology
Data Type
The dataset is real-world data and consists of pictures taken from various highways in the Gothenburg area of Sweden, including different seasons and weather conditions. Its purpose is to aid in object and lane detection and classification, as well as detecting open spaces.
Anonymization
The data has been anonymized by blurring faces, persons, and license plates.
Access
The dataset is available for all AI Sweden partners.
Size
84GB
Annotations
Annotations were performed manually by Kognic (formerly Annotell).
The Volvo Highway Dataset includes 29,000 labeled images with annotations for road objects, lane markings, road edges, and open space. These annotations are grouped into 7 classes for vehicles, 3 classes for lane markers, and 4 classes for road edges. Additionally, the dataset includes polygons for objects that can be used for identifying and locating specific objects within the images through semantic segmentation.
Terms and conditions
To use this dataset, you must comply with the Highway Dataset Terms and Conditions available below. All intellectual property rights, title, and ownership (including trademarks, patents, copyrights, etc.) in and to the Dataset remain with VOLVO (or its third-party licensors, as applicable).
Dataset specifics
In this project, we present a new image dataset containing exclusively Swedish highway data. The data is composed of images from different highways in Sweden, more specifically around Gothenburg. The dataset has been acquired during different seasons which has made it possible to capture different weather conditions. The aim of the dataset is to be used for object detection and classification, lane detection and classification, and free-space detection.
To create this dataset, an initial study of the sensor configuration was needed. Then, the sensors were placed on a test truck and a plan for data collection was constructed. The data was continuously acquired during different seasons and then processed and sent for annotation. The annotation was performed by an external supplier Annotell. The annotations were done manually to get more accurate results.
The Volvo Highway Dataset contains 28778 labeled images. The annotations include road objects, lane markings, road edges, and free space. These annotations are divided into 7 classes of object vehicles, 3 classes of lane markers, and 4 classes of road edges. In addition, the dataset contains polygons for the object that can be used for semantic segmentation and object localization.
More specifications can be found here
Use cases to date
1. The Perceptron Project - developing deep neural networks for autonomous vehicles for highways in Sweden.
The global automotive industry is adapting deep learning as a key technology in several areas, particularly autonomous driving, which poses a threat to the Swedish automotive industry. The Perceptron project aims to address this by developing a concept for the data-driven evolution of deep learning solutions, as well as building the necessary infrastructure for logging data, training networks, and continuous deployment. The project also investigates different training platforms and embedded inference platforms, which can have a significant impact on future product decisions for OEMs and suppliers.
The dataset is used for the detection of the following:
- Road objects
- Lane markers
- Road edges
- Free space
Read more about the Perceptron Project in the Perceptron Public Report:
Access
The dataset is available for all AI Sweden partners. Contact Beatrice Comoli for further instructions on how to access the data. If you are interested in becoming a partner of AI Sweden, getting access to the partner benefits, including the Data Factory and datasets, or in sharing a dataset or a model, please feel free to reach out.
